
Speaking of stepper motors, it should be familiar to engineers in the electrical control industry! Its error will not accumulate for a long time, can achieve precise positioning, control is simpler than servo, etc., but the premise of precise control of stepper motor is that the motor does not lose the step, how can we avoid stepping motor out of step?
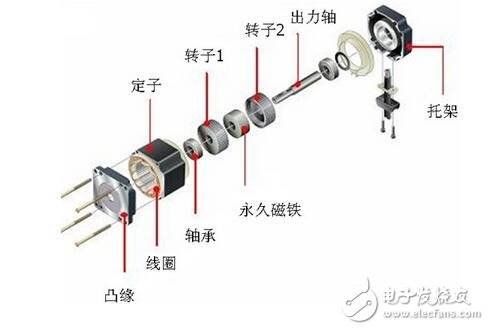
A stepper motor is an open-loop control motor that converts an electrical pulse signal into an angular displacement or a linear displacement. In the absence of out-of-step conditions, the speed and stop position of the motor depend only on the frequency and pulse number of the pulse signal and are not affected by the load change. When the stepper motor receives a pulse signal, the motor is set according to the setting. The direction is rotated to a fixed angle (step angle or step angle), and the angular displacement and motor speed of the motor are controlled by controlling the number of pulses and the pulse frequency to achieve precise open loop control. In addition, there is always a certain error between the angle of the stepping motor and the theoretical step distance. There is always a certain error from one step to any step. However, the number of steps per step of the stepper motor is one revolution. In the same way, the step error will not accumulate over a long period of time without losing the step.
All of the above mentioned are in the case of not losing step, how can we avoid losing step? First we need to know the factors that cause the motor to lose synchronization:
1. The rotor acceleration is slower than the rotating magnetic field of the stepper motor;
2. The average speed of the rotor is higher than the average rotational speed of the stator magnetic field;
3. The motor load inertia is large;
4. The stepper motor generates resonance.
When the rotor acceleration is slower than the rotating magnetic field of the stepping motor, that is, when the rotor speed is lower than the commutation speed, the motor will lose the step. This is because the input motor has insufficient electric energy, and the generated torque cannot make the rotor speed keep up with the rotation speed of the stator magnetic field. This causes a loss of step. The average rotor speed is higher than the average rotational speed of the stator magnetic field. This is because the stator energizes for a long time, which is greater than the time required for the stepping. The rotor obtains too much energy during the stepping process, resulting in excessive torque generated by the motor. Causes the motor to step out.

The above reason that the stepping motor is out of step is essentially caused by improper selection of the stepping driver. Only the correct and appropriate stepping driver can be selected to make the stepping motor exert its control precision advantage. Choosing the right driver requires a driver greater than or equal to this current based on the motor current. A subdivided drive can be used if low vibration or high precision is required. For high torque motors, use high voltage drives as much as possible to achieve good high speed performance. At the same time, for the driving power supply, many people directly use the switching power supply as the driving power supply. However, it is generally best not to use a switching power supply, especially a large torque motor, unless a switching power supply that is more than twice as large as the required power is used. Because the motor works as a large inductive load, it will form an instantaneous high voltage on the power supply end. The overload performance of the switching power supply is not good, it will protect the shutdown, and its precision voltage regulation performance is not needed, and sometimes it may cause damage to the switching power supply and the driver. For the driving power of the stepping motor, a DC power source that is transformed by a conventional ring or R type transformer can be used.

The stepper motor produces resonance because the pulse frequency received by the motor is equal to the natural frequency of the stepper motor, which is related to the subdivision of the driver. When we generally use a stepper motor, the subdivision capability of the driver is important, and the smaller the resonance range, the better. The large inertia of the motor load is caused by the overload of the motor, so you only need to pay attention to avoid overloading the motor to avoid it.
To know whether it is overloaded, we must understand the basic parameters such as the load characteristics of the motor. Guangzhou Zhiyuan Electronics Co., Ltd. has introduced a set of control stability, control accuracy, response time, load characteristics and motor performance efficiency for stepping and servo systems. Mature test program - MPT1000 motor test system. MPT1000 motor test system is a good helper for R&D personnel, and the manufacturer controls the quality of the gate!
Magnetic Transducer External Drive Type
The magnetic transducers (External Drive Type) are versatile and customizable to different physical sizes, housings, mounting options, power consumptions. Our magnetic transducers are engineered to be used with an external drive circuit. This allows our customers the flexibility to design and customize the circuitry to meet their needs. External circuitry allows different frequency ranges to be used to create multiple sounds through excitation waveform. Our magnetic transducers come in a slim-line profile and are a cost-effective solution. Our extensive capabilities make our magnetic transducers an excellent solution for high/low tones, siren, and chime sounds.
Piezoelectric Buzzer,Passive Magnetic Buzzer,External Drive Buzzer,Magnetic Transducer External Drive Type
Jiangsu Huawha Electronices Co.,Ltd , https://www.hnbuzzer.com