
Aiming at the requirements of modern power supply frequency modulation and amplitude modulation, it is proposed to use PIC16F873 to generate SPWM wave control IR2136 to trigger IGBT to generate PWM wave to act on the inverter to generate standard sinusoidal waveform, thus achieving frequency conversion and amplitude modulation. At the same time, the output of the inverter bridge is sampled and filtered by the AD module to realize PI closed-loop control of the system. The simulation analysis by SIMULINK component in MATLAB shows that the output voltage dynamic response speed of this scheme is fast, with good precision control and real-time performance, small waveform distortion and high reliability.
With the advancement of science and technology, power quality has increasingly become the basis for the normal and good work of various electrical equipment. An ongoing research topic in the field of power technology is to study the reliability and stability of power supplies as the lifeblood of the electronic information industry.
The inverter is the core part of the power supply, and its modulation technology largely determines the quality of the power supply output voltage. The most commonly used modulation technique today is sinusoidal pulse width modulation (SPWM). With the advent of microcontrollers and their widespread application, intelligent control methods have gradually replaced traditional discrete component circuit generation methods or dedicated chip generation methods. The advantage of the intelligent inverter power supply is that it can not only realize the output of the modulated signal, but also provide an interface for the monitoring, processing and display of the system data parameters. At the same time, it combines with modern computer technology to produce fault self-diagnosis and self-protection functions, which can improve the stability of the system.
Under the premise of fully considering the cost and stability requirements of industrial control, this design uses PIC microcontroller as the control core, and then assists related external circuits to form an inverter power supply control system with advantages such as stability and intelligence.
First, the specific circuit design
The single-phase bridge inverter circuit is shown in Figure 1. [1] Under the normal working condition of the circuit, the two pairs of switching tubes need two sets of driving pulses with opposite phases to be controlled separately, so that VT1 and VT4 are simultaneously turned on and off and VT2 and VT3 are simultaneously turned on and off. The input DC voltage is 220VAC, and the load of the inverter is R. When the switches VT1 and VT4 are turned on, and VT2 and VT3 are turned off, the current flows through VT1, R and VT4, and the polarity of the voltage on the load is left and right negative; When the switches VT1 and VT4 are turned off and VT2 and VT3 are turned on, current flows through VT2, R, and VT3, and the polarity of the voltage on the load is reversed, and the direct current is converted into alternating current. To change the output AC frequency, change the switching frequency of the two sets of switches, and then get the positive and negative half-cycle symmetrical AC square wave voltage. When the load is purely resistive, the load current and voltage waveforms are the same and the phase is the same. When the load is inductive, the current lags behind the voltage, and the waveforms are different. The output is a superposition of a single-phase inverter circuit equivalent to three phases of 120° difference, that is, a three-phase inverter, and the principle thereof will not be described again.
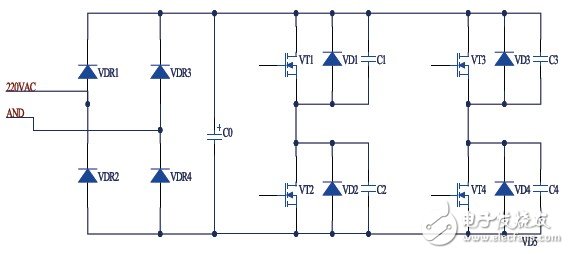
Figure 1 Single-phase bridge inverter circuit
Second, generate PWM wave chip selection
The design circuit is a single-phase full-bridge inverter circuit, and its main circuit is a typical DC-AC inverter circuit. The MC filtered signal is sampled by the single-chip microcomputer, and the obtained data is input to the PIC16F873 single-chip microcomputer. The data is processed by the PIC16F873 single-chip microcomputer chip, and the corresponding SPWM signal is output to the IR2136 driving circuit to control the switching circuit of the inverter circuit. In order to control the output of the inverter, adjust the operating temperature of the current monitoring system, and protect the control system circuit. There is also a keyboard, control frequency and amplitude, and a display module for displaying the working state of the system.
The PIC16F873 single-chip circuit is the control core circuit of this system. It mainly plays the following two functions: providing SPWM control signal for the drive circuit, controlling the on/off of the inverter bridge, and AD sampling the output voltage.
The main function of the integrated circuit IR2136 chip is to generate a corresponding trigger level to control the switching of the switching circuit of the inverter circuit, thereby controlling the output of the inverter. In addition, since the system outputs not only SPWM waves, but also low-order and high-order harmonics. This design uses an LC filter circuit to achieve the ultimate input standard sine wave.
Ω=2R/L is the cutoff angle frequency, R is the nominal impedance, and the cutoff frequency is fc, then there are:

Third, system software design
The core part of software design is the generation of SPWM signals. In this design, a symmetric wave sampling method using a triangular wave as a carrier wave and a sine wave as a modulation wave is classical, and a series of rectangular waves having equal amplitudes but different widths are obtained. Then calculate the duty cycle of the rectangular wave using the online calculation method:
Let N be the carrier modulation wave ratio, that is, N=fc/fr. where fc is the carrier frequency and fr is the modulation wave frequency. The SPWM signal of this system is generated by the single chip microcomputer, so the carrier frequency can be calculated by the following formula:

Among them, the variable N represents a frequency dividing factor (1, 8, 64, 256 or 1024), and fclki/o is an MCU clock.
Let M=UR/UC be the modulation depth, which generally ranges from 0 to 1, where UC is the carrier amplitude and UR is the modulation amplitude. Changing the amplitude of the modulated wave changes the amplitude of the fundamental voltage of the output.
According to the principle of the rule sampling method, assuming that there are N rectangular waves in one cycle, the duty ratio Di of the i-th rectangular wave is:

By setting the microcontroller, the duty cycle is calculated by the above formula to multiply it by the TOP value of the counter to form a sine table. Then send the data to the compare register, configure the microcontroller I / O port register, and output the SPWM signal at the PD4 port. The entire SPWM generation program flow chart and real-time feedback diagram are shown in Figure 2:
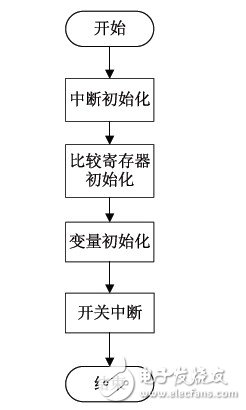
Figure 2 SPWM generation block diagram
4L Deep Fryer,Household Electric Deep Fryer,Extra Filter 4.5L Electric Deep Fryer,Timer Control Electric Deep Fryer
Shaoxing Haoda Electrical Appliance Co.,Ltd , https://www.zjhaoda.com