
With the development of society, the blind people are increasingly eager to pursue independent life and career, but to ensure that safe and free activities in the busy city life requires a special guide device to assist. Therefore, we have to design a multi-functional guide car to complete this task.
Project background / topic motivation
In real life, we have encountered some blind people who live independently. They face big problems in their travels. For example, they always encounter various obstacles in the process of walking blindly. Therefore, we would like to be able to make an AVR MCU-based guide car to help them solve this problem and achieve a better independent life. At the same time, in the process of doing this car, we can also learn some knowledge about AVR MCU. The AVR MCU is a more widely used product. We think that if we can learn more about the AVR MCU, it should bring great benefits to our future work. In summary, we want to be a guide vehicle based on AVR MCU.
Functional requirements
The road condition information is collected by the CMOS camera, and it is judged by the CPU whether there is an obstacle in front. If not, the car will continue to guide people forward; if there is an obstacle, the car will sound an alarm. It is detected by the ultrasonic sensor, and if it can be crossed, it will continue to advance, and if it cannot pass, it will stop. If you need to turn, slow down the turn. At the same time, there is a GPS navigation system on the guide car, which can know exactly where the blind person is.
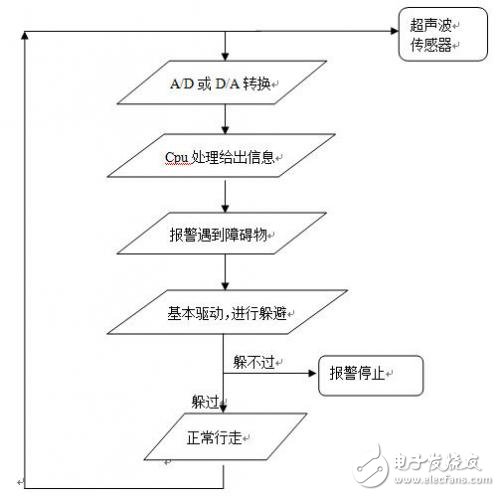
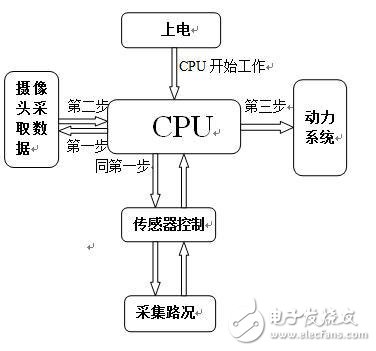
Figure 1 System Architecture
Performance requirements
1. Accuracy: In the process of car hunt, you can't deviate from the blind road. You should follow the blind road accurately.
2. Stability: In the process of guiding blindness, it is impossible to easily crash.
3, safety: in case of danger, you can call the police in time.
4, low power consumption: AVR microcontroller is very good in terms of low power consumption. Selecting an AVR MCU allows for low power performance requirements.
Design
System function realization principle
System hardware block diagram
Note: After power-on, the CPU starts working. First, the CPU starts to control the camera and the sensor to work at the same time, collects information, analyzes the collected information, performs A/D or D/A conversion inside the CPU, and then transmits the converted information to the steering gear to make the servo Work under the control of the CPU.
Hardware platform selection and resource configuration
Pre-development with the EVK1100 development board
System software flow
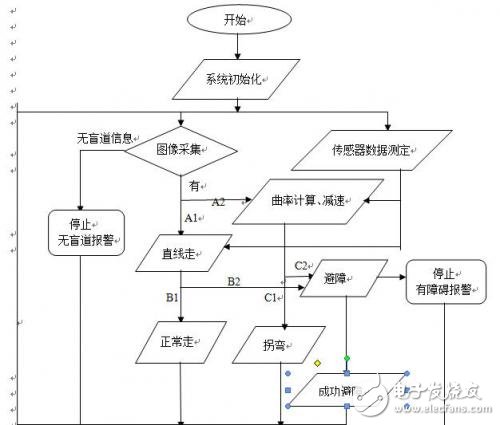
Program flow chart
Description: A1 has no corners and A2 has corners.
B1 has no obstacles, B2 has obstacles
C1 turns, C2 has obstacles
The system is expected to achieve results
The final product of this design can safely guide blind people to walk in the blind. It can safely and accurately find blind lanes and walk in blind lanes to guide blind people to walk. When encountering an obstacle, an alarm can be issued to remind the blind person of obstacles in front of them and avoid them in time. When the blind person issues a positioning command to them, the GPS module can be used to quickly inform the blind person of the specific location.
Kara offers a wide range of illuminated and non-illuminated Rocker Switches.Ranging from 4 to 9poles,16VA to 30 amp,with many styles of colors and functions,especially the switches with High-Current and some types which meet the industry standard IP65,IP68. Certifications include UL, CSA, TUV, CE, and more.

Middle-Sized Rocker Switches,Middle Rocker Switches,Economic Middle-Sized Rocker Switches,Universal Middle-Sized Rocker Switches
Ningbo Kara Electronic Co.,Ltd. , https://www.kara-switch.com